Описание библиотеки классов CAScentre_DLL_AllScale.
Описание.
Библиотека предназначена для работы с весовым оборудованием производства CAS Corporation: получения от них текущего веса (состояния) и передачи в windows-приложения.
Поддерживаемые ОС:
• Windows 98/Me/Nt/2000/XP, с установленным Ms .Net framework 2.0.
• Windows Vista/7.
Установка.
Для установки приложения запустите setup.msi и следуйте инструкциям установщика.
Настройка весов и список поддерживаемого оборудования.
На данный момент драйвер поддерживает следующее оборудование CAS:
- Все весовые индикаторы (CI, NT, BW, BI);
- Торговые весы EB, ED, PB, AP, AD, ER, EMR, ED, DB, DB-H, DB-2, DB2-NEW, PDS;
- Лабораторные весы – MWP.
Если нужных Вам весов нет в списке, отправьте запрос в ООО «КАСцентр», возможно ваши весы уже поддерживаются.
Для настройки весового оборудования необходимо выставить на весах скорость обмена «9600», постоянную (непрерывную) передачу данных, отключить принтер. Подробнее в руководстве по эксплуатации к весам. По вопросам настройки обращайтесь в ООО «КАСцентр».
Методы и свойства.
Название метода Параметры Возвращаемое значение Описание
ConnectTCP • IP – ip-адрес весов;
• Port – номер порта связи для Ethernet соединения;
• scaleType – номер типа весов. Если этот параметр равен нулю, то происходит автоматическое определение типа весов.
Нет. Метод производит попытку соединиться с весами по Ethernet, в случае ошибки возникает соответствующие исключение.
ConnectRS • ComPortNumber – номер порта связи для КЫ соединения, например, значение «1» означает связаться по порту “COM1”;
• BaundRate – скорость обмена для RS-соединения, например, 9600.
• scaleType – номер типа весов*.
Нет. Метод производит попытку соединиться с весами по RS232, в случае ошибки возникает соответствующие исключение.
Disconnect Нет. Нет. Разрывает установленное соединение с весами.
Update Нет. Текущий вес на весах – вещественное число двойной точности. Метод производит запрос к весам для получения текущего состояния весов. После вызова этого метода обновляются все свойства доступные данным весам.
CurrentWeight Нет. Текущий вес.
Метод возвращает данные полученные в результате последнего обновления.
CurrentUnitsOfMeasure Нет. Текущие единицы взвешивания (граммы, килограммы, тонны).
Метод возвращает данные полученные в результате последнего обновления.
CurrentWeightKg Нет. Текущий вес в килограммах. Метод возвращает данные полученные в результате последнего обновления.
CurrentStable Нет. True – в данный момент вес стабилен.
False – в данный момент вес не стабилен.
Метод возвращает данные полученные в результате последнего обновления.
CurrentGross Нет. True – в данный момент весы взвешивают вес в режиме брутто.
False – в данный момент весы взвешивают вес в режиме нетто. Метод возвращает данные полученные в результате последнего обновления.
Существующие ограничения для разных моделей весов.
Драйвер позволяет работать со многими моделями весов CAS. Некоторые модели весов могут поддерживать отправку не всех параметров о своем состоянии. В таблице перечислены все модели весов и параметры, которые весы передают в компьютер.
Модель весов CAS Поддержка получения свойств состояния весов
Текущий вес
(метод CurrentWeight) Текущие единицы измерения
(методы: CurrentUnitsOfMeasure, CurrentWeightKg) Стабильность веса
(метод CurrentStable) Брутто/нетто
(метод CurrentGross)
Все весовые индикаторы (CI, NT, BW, BI), весы PDS
Да
Да
Да
Да
Торговые весы EB, ED, PB, AP, AD, ER, EMR, ED, DB, DB-H, DB2-NEW
Да
Да
Да
Нет
DB2
Да
Да
Нет
Нет
Примеры работы с драйвером.
Пример 1. C#.NET.
using System;
using System.Collections.Generic;
using System.Text;
namespace Test
{
class Program
{
static void Main(string[] args)
{
CAScentre_DLL_AllScale.GetWeight scale = new CAScentre_DLL_AllScale.GetWeight();
scale.ConnectTCP("127.0.0.1", 8111, 0);
var weight = scale.Update();
Console.WriteLine("TEst. {0} kg", weight);
scale.Disconnect();
}
}
}
Пример 2. Скрипт.
// Создание объекта драйвреа
Object o = CreateObject(CAScentre_DLL_AllScale.GetWeight);
// Установка соединения с весами
o.ConnectTCP( 192.168.0.3, 8111, 0 );
// Получение веса от драйвера
Weight = o.Update();
// Вывод данных на экран.
Print( Weight );
// Ожидание 5 сек.
Sleep(5000);
// Получение веса от драйвера
Weight = o.Update();
// Вывод данных на экран.
Print( Weight );
// Разрыв соединения с весами.
o.Disconnet();
Судя по описанию работает она на вин 7, Кто регал библиотеку на вин 10


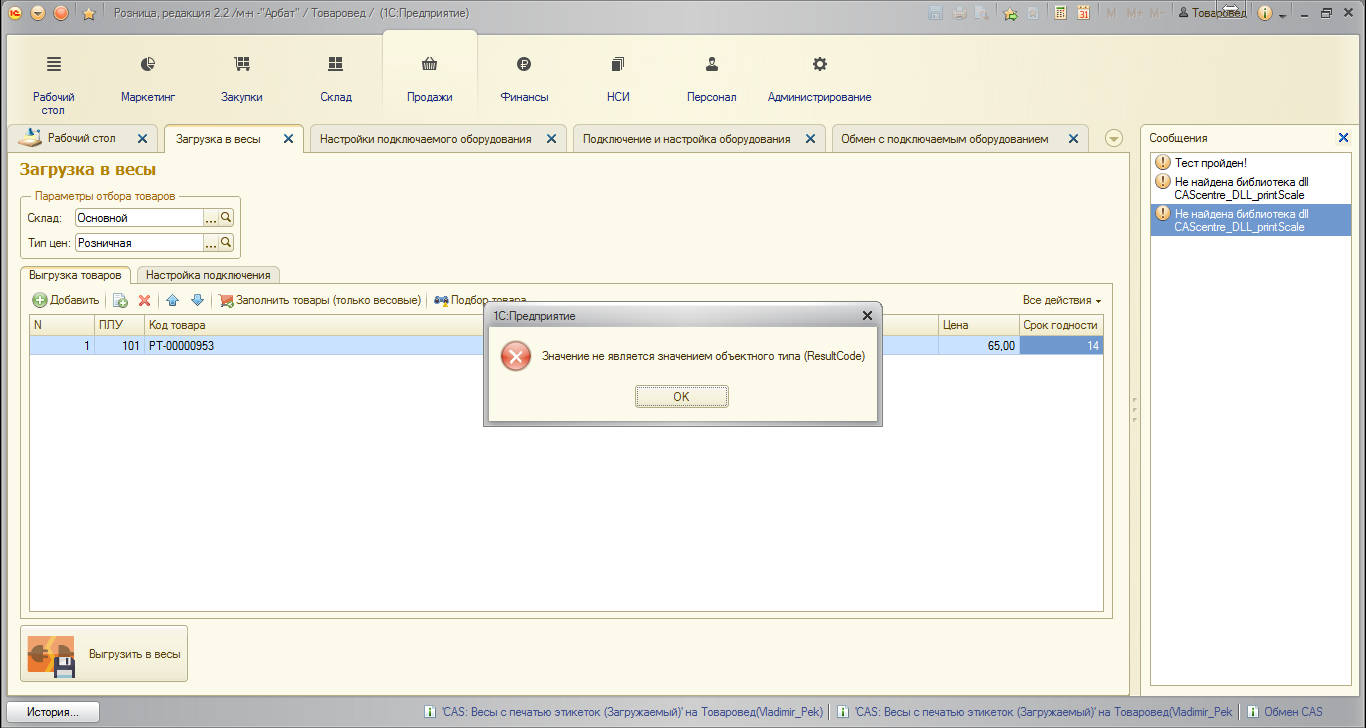
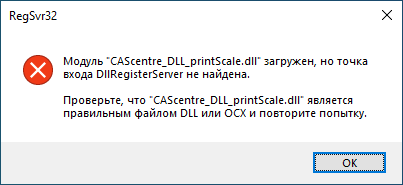
{kind=link}